Paramater Learning(参数学习)
1.Gradient Descent(梯度下降)
假定我们有一个hypothesis函数,我们有一个方法测量合适的数据,现在我们需要估计hypothesis函数的参数,这时梯度下降派上用场
假设我们要画出基于θ0和θ1的假设函数(hypothesis)(实际上我们把代价函数绘制为参数估值函数) 我们不是绘制x和y本身,而是我们的假设函数的参数范围和由选择特定参数集所产生的代价
我们把θ0放在x轴上,把θ1放在y轴上,成本函数放在垂直z轴上。 我们的图上的点将是使用具有那些特定θ参数的我们的假设的代价函数的结果。 下图描绘了这样的设置
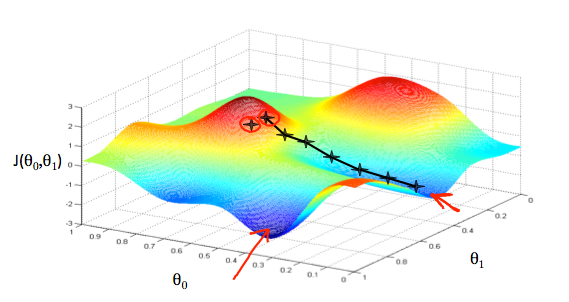
我们知道,当我们的成本函数在图中的凹坑的最底部时,即当它的值是最小值时,我们已经成功。红色箭头显示图中的最小点。
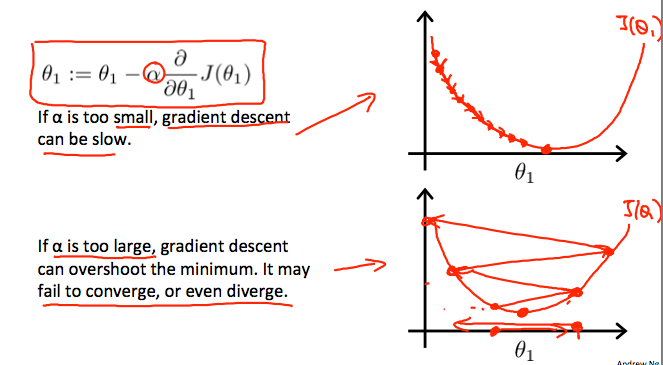
我们这样做的方式是通过我们的代价函数的导数(一个函数的切线)。切线的斜率是在该点的导数,它将给我们移动的方向。我们在具有最陡下降的方向上逐步降低代价函数。每个步骤的大小由参数α确定,其被称为学习速率。
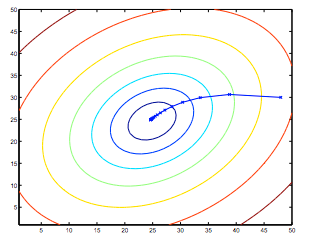
例如,上图中每个“星”之间的距离表示由我们的参数α确定的步长。较小的α将导致较小的阶跃,较大的α导致较大的阶跃。步进的方向由J(θ0,θ1)的偏导数确定。根据图表上的起始位置,可以在不同的点结束。上图显示了两个不同的起点,分别位于两个不同的地方。
梯度下降算法是:
重复直到收敛:
θj:= θj − α ∂/∂θj J(θ0,θ1)
j = 0,1表示特征索引号。
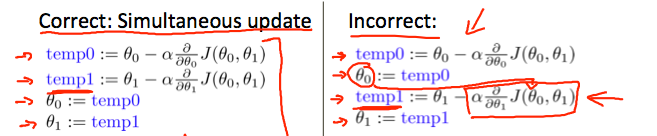
在每次迭代j时,应该同时更新参数θ1,θ2,…,θn。 在第j次迭代计算另一个参数之前更新特定参数将导致错误的实现
2.Gradient Descent Intuition
在这个视频中,我们探索了一个场景,其中我们使用一个参数θ1,并绘制其代价函数来实现梯度下降。 我们对单个参数的公式是:
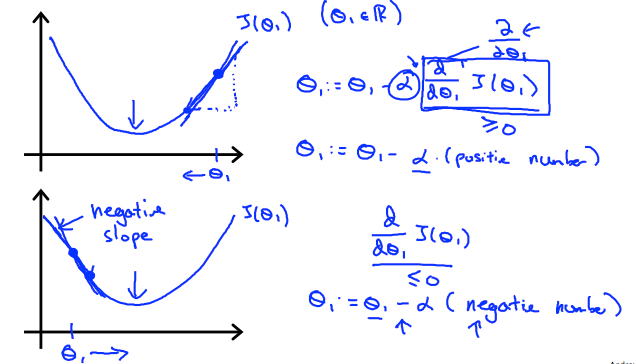
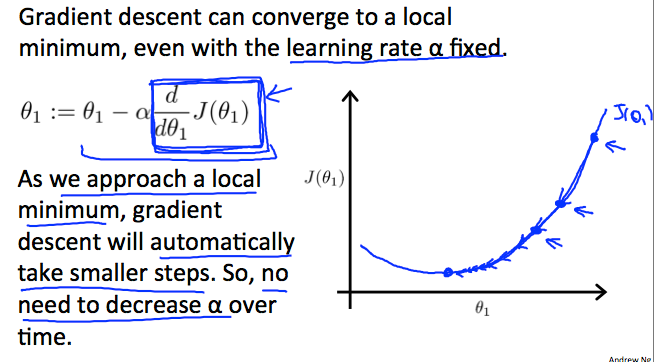
重复直到收敛:θ1:=θ1 - α d/dθ1 J(θ1)
无论d/dθ1 J(θ1)的斜率符号如何,θ1最终收敛到其最小值。 下图表示当斜率为负时,θ1的值增加,而当其为正时,θ1的值减小。
另一方面,我们应该调整参数α,以确保梯度下降算法在合理的时间内收敛。 不收敛或太多的时间来获得最小值意味着我们的步长是错误的。
梯度下降如何以固定步长α收敛?
收敛后面的直觉是当我们接近我们的凸函数的底部时,d/dθ1 J(θ1)接近0。 至少,导数将始终为0,因此我们得到:
θ1:=θ1−α∗0
Gradient Descent For Linear Regression
Note: [At 6:15 “h(x) = -900 - 0.1x” should be “h(x) = 900 - 0.1x”]
当具体应用于线性回归的情况下,可以导出梯度下降方程的新形式。我们可以替换我们的实际代价函数和我们的实际假设函数,并将公式修改为:
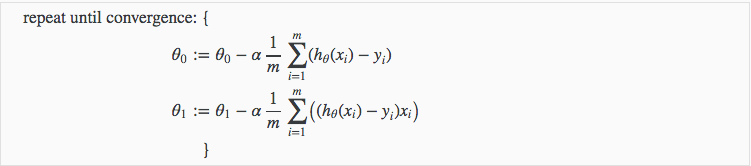
其中m是训练集的大小,θ0是将与θ1同时改变的常数,xi,yi是给定训练集(数据)的值
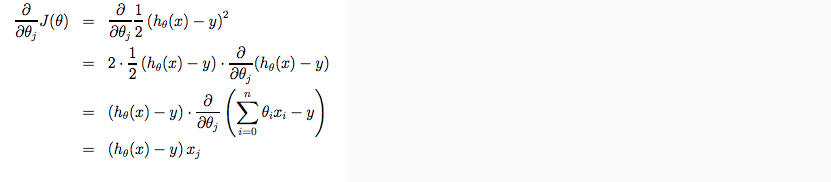
注意,我们已经将θj的两种情况分离为θ0和θ1的单独方程;并且对于θ1,由于导数,我们在末端乘以xi。以下是单个示例的∂/∂θj J(θ)的推导:
所有这一切的点是,如果我们开始猜测我们的假设,然后重复应用这些梯度下降方程,我们的假设将变得越来越准确。
因此,这是对原始成本函数J的简单梯度下降。该方法查看每个步骤的整个训练集中的每个示例,并且称为批量梯度下降。注意,虽然梯度下降一般易受局部最小值的影响,我们在这里提出的用于线性回归的优化问题只有一个全局的,没有其他局部的最优的;因此梯度下降总是收敛(假设学习速率α不太大)到全局最小值。实际上,J是凸二次函数。这里是梯度下降的例子,因为它运行以最小化二次函数。